

细粉加工设备(20-400目)
我公司自主研发的MTW欧版磨、LM立式磨等细粉加工设备,拥有多项国家专利,能够将石灰石、方解石、碳酸钙、重晶石、石膏、膨润土等物料研磨至20-400目,是您在电厂脱硫、煤粉制备、重钙加工等工业制粉领域的得力助手。






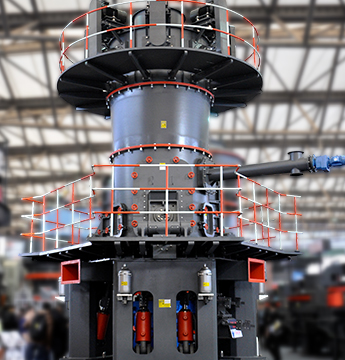
超细粉加工设备(400-3250目)
LUM超细立磨、MW环辊微粉磨吸收现代工业磨粉技术,专注于400-3250目范围内超细粉磨加工,细度可调可控,突破超细粉加工产能瓶颈,是超细粉加工领域粉磨装备的良好选择。

粗粉加工设备(0-3MM)
兼具磨粉机和破碎机性能优势,产量高、破碎比大、成品率高,在粗粉加工方面成绩斐然。

关节机械手内部结构

.jpg)
关节型工业机械手的结构设计doc 34页 原创力文档
2017年11月23日 1978年美国斯坦福大学、麻省理工学院联合研制多关节型型工业机械手,装有小型电子计算机进行控制,用于装配流水线作业,定位误差可小于1毫米,这使机械手的发展 2014年3月5日 本文对机械手进行总体方案设计,确定了机械手的坐标形式和自由度,确定了机械手的技术参数。 同时,设计了机械手的夹持式手部结构,设计了机械手的手腕结构,计算出 电动式关节型机器人机械手的结构设计与仿真—毕业设计(论文 机械手运动原理及其内部结构深度解析机械手由多个连杆和关节组成。 机械手一般由底座、执行机构,如夹钳、吸盘等,以及它们之间的关节和连杆组成,机械手能够在其活动范围内,实现 机械手运动原理及其内部结构深度解析百度文库2024年11月26日 本次设计工作首先對实体安川机器人 進行了细致的研究,了解了其内部的具体結构,安川机器人的結构可分為六個轴系, 然後根据六個轴系對其内部結构進行分解,以便 2025年度关节型工业机械手的结构设计毕业设计说明书 豆丁网2019年7月1日 机械手一般由底座、执行机构,如夹钳、吸盘等,以及它们之间的关节和连杆组成,机械手能够在其活动范围内,实现任意运动和转向,我们一般把活动的关节称为自由度。机械手运动原理及其内部结构深度解析,原来设计起 2018年8月28日 关节机器人(Robot joints),也称关节手臂机器人或关节机械手臂,是当今工业领域中最常见的工业机器人的形态之一。 适合用于诸多工业领域的机械自动化作业,比如,自动装配、喷漆、搬运、焊接等工作。【Robot 学院】一文读懂六轴机器人运动原理和机械
.jpg)
机械臂速成小指南(三):机械臂的机械结构 知乎
2022年7月29日 在一个开式运动链中,每一个移动关节或转动关节都为机械结构提供一个自由度( degrees of freedom , DOF )。移动关节可以实现两个连杆之间的相对平移,而旋转关节可以实现两个连杆之间的相对转动(旋转关节相较移 2023年4月5日 在一个开式运动链中,每一个移动关节或转动关节都为机械结构提供一个自由度( degrees of freedom , DOF )。移动关节可以实现两个连杆之间的相对平移,而旋转关节可以实现两个连杆之间的相对转动(旋转关节相较移动 机械臂速成小指南(三):机械臂的机械结构机械臂 2021年8月7日 1978年美国斯坦福大学、麻省理工学院联合研制多关节型型工业机械手,装有小型电子计算机进行控制,用于装配流水线作业,定位误差可小于1毫米,这使机械手的发展达到 关节型工业机械手的结构设计毕业设计说明书2019年2月12日 工业机器人是面向工业领域的 多关节机械手 或 多自由度 的机器装置,它能自动执行工作,是靠自身动力和控制能力来实现各种功能的一种机器。请输入图片描述 一、机器人驱动装置 概念:要使机器人运行起来, 需给各个 工业机器人内部结构原理,这是我见过最详细的解 2014年3月5日 摘要本文简要介绍了电动式关节型机器人机械手的概念,机械手硬件和软件的组成,机械手各个部件的整体尺寸设计,气动技术的特点。本文对机械手进行总体方案设计,确定 电动式关节型机器人机械手的结构设计与仿真—毕业设计(论文 2023年11月15日 43 传输机械手“腕部关节”的升级 机械手附加的“腕部关节”的机械定位所采用的滚动体会影响机械手的定位精度,一般是轴承或者凸轮,Y 和Rz的精度会稍微提高,X 的精度明显提高,这种优化设计的结果,在实际使用中往 晶圆传输机械手的实现途径及其结构设计参考网
.jpg)
简述四轴机械手的结构及原理
2024年5月22日 四轴机械手是一种高度集成化和自动化的机械设备,广泛应用于工业生产线,其结构与原理对于理解其高效、精确的工作方式至关重要。对此,你了解四轴机械手的结构及原 圆柱坐标机器手的空间运动是用一个回转运动及两个直线运动来实现的,这 种机器手构造比较简单,精度还可以,常用于搬运作业。 考虑到腰座是机器手 的个回转关节,对机械手 的最 简述机械手结构的设计和分析 百度文库2021年1月29日 关节式主从机械手 1 范围 本标准规定了关节式主从机械手的型号编制、要求、试验方法、检验规则、现场安装、随行文件、标志、包装、运输。 本标准适用于采用关节式布 关节式主从机械手2022年9月24日 ANSYS完成了一款五自由度关节式机械手设计及分析。1机械手结构方案 关节式机器人具有很好的作业适应性,是目前通用工业机器人的主要结构形式。机械手的驱动形式主 基于Solidworks和ANSYS的五自由度关节式机械手结构设计 知乎,中文互联网高质量的问答社区和创作者聚集的原创内容平台,于 2011 年 1 月正式上线,以「让人们更好的分享知识、经验和见解,找到自己的解答」为品牌使命。知乎凭借认真、专业、友善的社区氛围、独特的产品机制以及结构化和 你似乎来到了没有知识存在的荒原 知乎2023年12月10日 灵巧手结构设计方案浅析正常人类手指的结构分析灵巧手的设计主要是基于对人手解剖结构的参考,以实现拟人化的功能。因此,在研究过程中,我们依据医学上的解剖结构 灵巧手 (仿生手)的结构设计 知乎

6轴3KG关节机械手 带内部结构图纸下载机械设备图纸
2024年11月15日 6轴3KG关节机械手 带内部结构图纸下载,该图纸类型属于机械设备、自动化设备图纸,图纸大小8547M,图纸格式为sldprt,igs,step,sldasm,stl,图纸软件为SOLIDWORKS 2014, 机械手手部的构造系模仿人的手指,分为无关节、固定关节和自由关节3种。手指的数量又可分为二指、三指、四指等,其中以二指用的最多。可根据夹持对象的形状和大小配备多种形状和大 机械手 百度百科2023年4月5日 相对应地称第二个关节为肩关节,第三个关节由于联结了胳膊和前臂,所以称为肘关节。拟人型机械手 的结构是最灵活的一种,因为其所有关节都是转动型的。另一方面,拟 机械臂速成小指南(三):机械臂的机械结构机械臂臂的允许 2023年6月18日 垂直关节机器人是一种具有串行链接结构的工业机器人。它通常由六个关节(6 接下来,我们来详细研究一下工业机器人的内部结构 。下图显示了川崎重工或川崎的中小型 工业机器人是如何制造的:机械臂组件和运动指南 知乎2022年7月29日 SCARE机械臂适合操纵较小的目标,关节由电机驱动。5 拟人型机械臂 拟人型机械手的几何构形由三个转动关节实现。其个关节的旋转轴与另外两个关节的旋转轴垂 机械臂速成小指南(三):机械臂的机械结构 知乎2019年8月16日 工业机器人是面向工业领域的多关节机械手或多自由度的机器人。很多人也喜欢叫它机械臂,它是自动执行工作的机器装置,是靠自身动力和控制能力来实现各种功能的一种 工业机器人内部结构及基本原理——天才AI Super Genius
机械手详细设计方案:腰座与传动系统详解CSDN博客
2025年4月7日 生产和应用机械手可以提高生产的自动化水平和劳动生产率,可以减轻劳动强度、保证产品质量、实现安全生产,尤其是在高温、高压、低温、低压、粉尘、易燃、易爆、有毒气和放射性等恶劣的环境中,它代替人进行正常的 2017年11月30日 毕业设计任务书 1.设计的主要任务及目标 (1)完成对多关节机械臂的机构本体中结构件、传动系统的选型设计; (2)利用软件完成机构各部分的仿真建模、装配及运动仿 毕业论文(设计)多关节机械臂机构设计技术研究 豆丁网2021年5月30日 23 机械手结构设计图21 机械手的结构机械手的结构(如图21)是机械手最终执行机构,是机械手赖以实现各种运动的实体,机械结构的布局、类型、传动方式以及驱动系统的设计直接关系着机械手的工作性能。关节型 (本科)机电专业毕业设计论文:四轴工业机械手结 2022年6月17日 气动机械手内部结构 气动机械手外观 每一个手指分为三段气囊结构,气囊充气时手指弯曲,气囊排空时手指伸展。 由于是气动软体结构,外观看上去比一般机械的灵巧手更 现在的仿生机械手需要用到什么电机? 知乎2021年12月31日 腾讯视频, 视频播放量 38645、弹幕量 7、点赞数 509、投硬币枚数 78、收藏人数 1744、转发人数 439, 视频作者 凯凯凯uk1027, 作者简介 2024卷起来哈哈,相关视频:人形机器人 手指机械结构,欠驱 仿生手指结构哔哩哔哩bilibili2025年4月3日 文章浏览阅读957次,点赞25次,收藏17次。随着工业自动化水平的不断提高和机器人技术的飞速发展,电动关节机械手作为现代制造业的核心装备之一,正日益展现出其不可 电动关节机械手设计:结构、控制与智能化发展 CSDN博客

晶圆传输机械手结构浅析 道客巴巴
2019年5月18日 按传动方式,可分为平面关节型机械手(ScARA)和径向直线运动(R—O)型机械手。 典型的平面关节型机械手(图1)有4个自由度,分别为大臂回转、小臂回转、末端执行器回转 2021年7月16日 33 简易机械手大臂部结构设计331 大臂部设计基本要求机械手的大臂在整个六关节的机械手的作业中起到至关重要的作业,机械手的作业空间及作业能力主要依托大臂完成 RV20F六轴机械手结构设计和实现机械制造和自动化专业 2017年10月10日 机器人手腕是连接末端操作器和手臂的部件, 它的作用是调节或改变工件的方位, 因而它具有独立的自由度, 以使机器人末端操作器适应复杂的动作要求。 工业机器人一般需要 详解:机器人手腕结构图2012年11月8日 电动式关节型机器人机械手的结构设计与仿真摘要本文简要介绍了电动式关节型机器人机械手的概念,机械手硬件和软件的组成,机械手各个部件的整体尺寸设计,气动技术 电动式关节型机器人机械手的结构设计与仿真—机械毕业设计 2019年2月12日 工业机器人是面向工业领域的 多关节机械手 或 多自由度 的机器装置,它能自动执行工作,是靠自身动力和控制能力来实现各种功能的一种机器。请输入图片描述 一、机器人驱动装置 概念:要使机器人运行起来, 需给各个 工业机器人内部结构原理,这是我见过最详细的解 2014年3月5日 摘要本文简要介绍了电动式关节型机器人机械手的概念,机械手硬件和软件的组成,机械手各个部件的整体尺寸设计,气动技术的特点。本文对机械手进行总体方案设计,确定 电动式关节型机器人机械手的结构设计与仿真—毕业设计(论文
.jpg)
晶圆传输机械手的实现途径及其结构设计参考网
2023年11月15日 43 传输机械手“腕部关节”的升级 机械手附加的“腕部关节”的机械定位所采用的滚动体会影响机械手的定位精度,一般是轴承或者凸轮,Y 和Rz的精度会稍微提高,X 的精度明显提高,这种优化设计的结果,在实际使用中往 2024年5月22日 四轴机械手是一种高度集成化和自动化的机械设备,广泛应用于工业生产线,其结构与原理对于理解其高效、精确的工作方式至关重要。对此,你了解四轴机械手的结构及原 简述四轴机械手的结构及原理圆柱坐标机器手的空间运动是用一个回转运动及两个直线运动来实现的,这 种机器手构造比较简单,精度还可以,常用于搬运作业。 考虑到腰座是机器手 的个回转关节,对机械手 的最 简述机械手结构的设计和分析 百度文库
青岛农业大学 武云霞
--锂矿提取碳酸锂环保制粉设备,锂矿提取碳酸锂环保制粉设备要多少钱
--方解石矿的用途
--高岭土的制粉工艺流程
--废矿渣
--zsw给料机
--浸出渣立磨粉体设备
--堆下活化给料机
--长春有卖塑钢矿石磨粉机的吗
--隆昌矿石磨粉机械厂
--钨矿雷蒙磨法
--液压岩石磨粉机械
--干粉石灰石生产线产量的计算
--橄榄石重钙雷蒙磨粉机
--重石灰石碳酸钙磨粉机
--广东韶关双权牌重钙磨粉机雷蒙机广东韶关双权牌重钙磨粉机雷蒙机广东韶关双权牌重钙磨粉机雷蒙机
--大理石 再利用
--新型无烟煤细磨机
--1小时35方页岩砂粉立磨
--白泥曲露天煤矿
--沈阳哪有卖粉碎
--矿石磨粉机废弃物
--研磨石灰石悬工业辊磨机
--碳酸钙矿石打粉机项目建设的必要性
--邢台临城方解石厂
--防城港方解石
--贵州粉石头,朱高岭土仅产于
--炉渣能磨粉煤灰么?
--陕西哪里有买石头粉碎机
--涂料刮灰机
--